![]()
ADL ROS2 Documentation
Welcome to the Applied Dynamics Lab ROS2 documentation! This guide covers all the ROS2 packages developed by the McGill Applied Dynamics Lab for robotic systems, particularly focusing on controlling the Franka Research 3.
Quick Start
- Getting Started: Check out the getting started guide
- Examples: Explore the tutorials (to come...)
Franka Controller
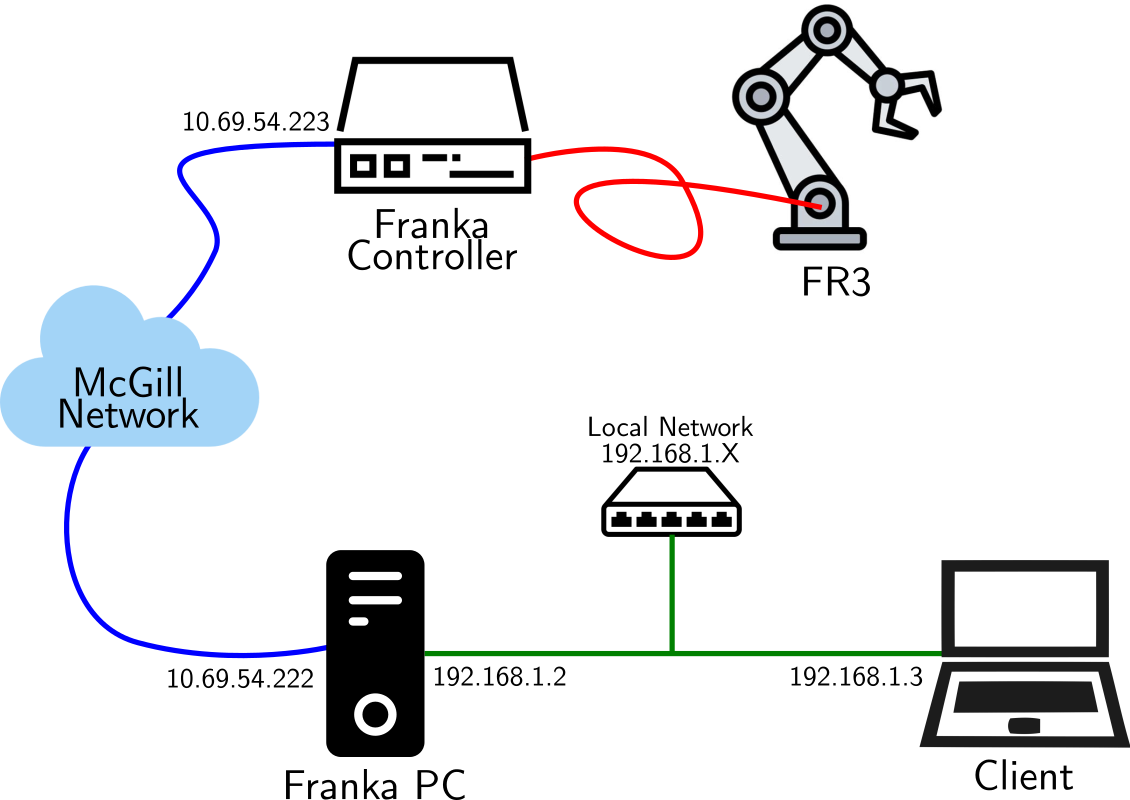
Main packages to control and develop with the Franka. The controller is divided in two:
- Franka Server: Low level interface with the arm. Runs on the mini-pc
- Franka Client: Higher level interface. Runs on the user's workstation.
Packages
Explore the available packages
System Requirements
The project has been tested and developed in Ubuntu 22.04 LTS. Other distros and OS might work.
Support
- 📖 Documentation
- 🐛 Issues: GitHub Issues
Made by the McGill Applied Dynamics Lab